
点云和与Google Maps的同步-5 Microstation V8i的新功能
任何GIS-CAD系统都迫切希望与Google Maps和Google Earth进行交互以及处理来自扫描仪的数据。 在这些方面,没有人会怀疑自由软件的发展速度快于专有软件。
现在,我正在审查Microstation V3i Select Series 8的第二次更新(8.11.09.107),很高兴知道还有进展。 让我们看看Series 3和Series 2都具有的一些新功能:
1.与Google Maps同步
在我之前提到的一篇文章中 与Google地球同步。 在这种情况下,他们增加了一项功能,该功能允许将dgn / dwg文件的当前视图与Google Maps同步,从而能够额外选择缩放级别。
这是从此完成的 工具>地理位置>在Google地图中打开位置
点击屏幕之前会出现一个浮动窗口,让我们可以选择从1到23的进场级别。
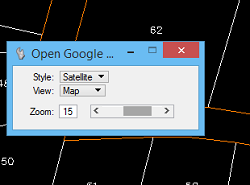
也可以选择视图,可以是:地图,街道或交通。
您还可以选择样式:地图,混合,浮雕或卫星。
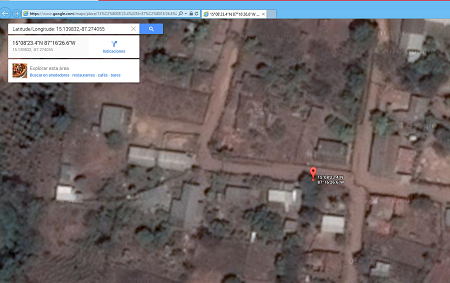
因此,系统将在互联网浏览器中打开,并选择部署。
还不错,但是很难理解为什么它不像添加它作为一个新层那么简单...在我所知道的情况下,它是下一个版本中他们将要做的下一件事。
2.保存的视图
它的功能类似于其他CAD / GIS程序很长一段时间以来的功能,这有助于保存直接访问特定部署的可能性。 与Bentley应用视图配置选项的最大不同之处在于,可以在其中定义哪些层将处于活动状态,什么类型的可见对象,视图透视图等等。
甚至可以定义哪些文件称为引用和可见性条件。

3.从AutoCAD 2013支持Realdwg
我们知道在2013 AutoDesk中修改了该文件,该文件将对AutoCAD 2014和AutoCAD 2015有效。
Microstation选择系列3可以本机打开,编辑和保存这些类型的文件。
在这方面,与AutoDesk达成的协议是一项伟大的成就,所有OpenSource都无法维持。 甚至不导入,更不用说本地编辑。
4.点云支持。
这是从Select Series 2开始的功能。尽管在新版本中,它们增加了可用性。
您可以处理格式的点数:
TerraScan BIN,Topcon CL3,Faro FLS,LiDAR LAS,Leica PTG - PTS - PTX,Riegl 3DD - RXP - RSP,ASCII xyz - txt,Optech IXF,ASTM e57,当然, Pointools POD,近年来收购后实现的技术。
5.支持虚拟化环境中的开发。
服务器虚拟化是最近的一个问题,但是随着我们现在对信任和宽带连接的控制得到更好的控制,它的功能日益增加
这样一来,几台服务器就可以共享进程,传输打开的会话并将容量分配给其他服务器,而不必像十年前那样处于物理状态。 因此,诸如GeoWeb Publisher或Geospatial Server之类的服务可以位于服务器云中,而不必担心饱和或由于老式流程所隐含的过载而具有排他性。
总的来说,我们发现Microstation V8i的新颖之处在于其第三系列。 尽管地理空间问题的某些方面总是比OpenSource能源慢,但在工业工厂工程和土木工程的垂直应用方面,它仍然是持续创新的重要基准。




